Алгоритм
Структурные элементы робота выполняют алгоритм его перемещения в пространстве.
Структура модели БПЛА.
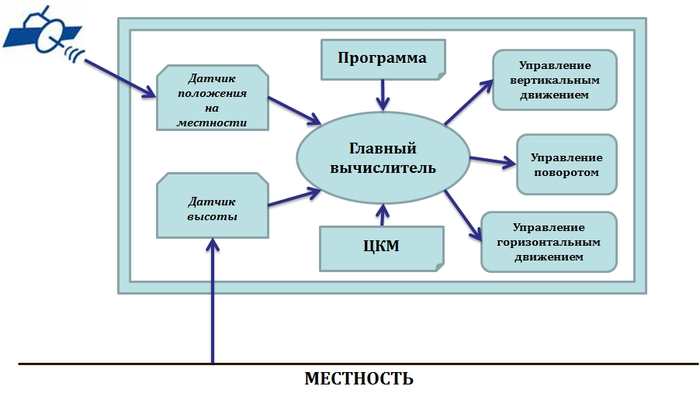
Чтобы БПЛА смог самостоятельно долететь до цели, ему нужны следующие составные части:
Датчик положения на местности – показывает над какой точкой земли робот находится
Датчик высоты – показывает высоту от поверхности земли
Цифровая Карта Местности (ЦКМ) - это цифровая модель местности, созданная путем цифрования картографических источников, она служит для того чтобы определить, что у него впереди по маршруту движения.
Управление горизонтальным движением – двигает робот вперёд или назад.
Управление поворотом – поворачивает робота в горизонтальной плоскости в нужном направлении на любой угол
Управление вертикальным движением – двигает робота вверх или вниз.
Программа – в ней записаны команды под управлением которых работает главный вычислитель. Некоторые команды программы используются для того чтобы:
1. Считывать данные с датчиков высоты и положения на местности.
2. Анализировать информацию поступающую от датчиков и в зависимости от анализа передавать управление тем или иным командам.
3. Управлять горизонтальным или вертикальным движением, а также поворотом.
4. Считывать данные с цифровой карты местности.
Главный вычислитель – работает под управлением программы с помощью команд которой считывает информацию с датчиков, преобразует команды программы в управляющие действия.
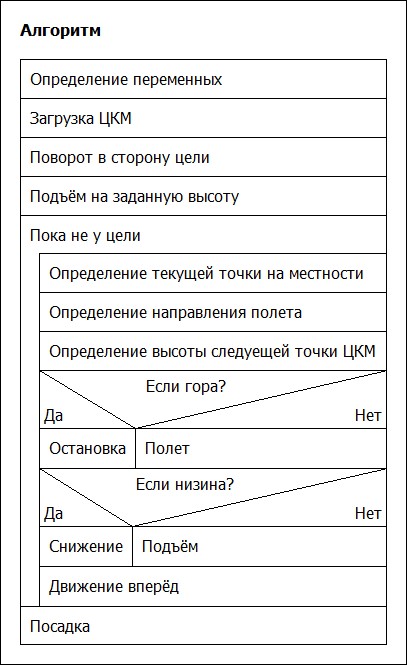
Алгоритм управления полетом.
Упрощённый алгоритм управления полётом